Специальная астрофизическая обсерватория
Российской Академии наук
Отчет о вертикализации телескопа БТА
2004 г
Определение наклона оси А (подготовка к вертикализации)
С 1980 года наклон вертикальной оси вращения БТА контролируется по электронным уровням и методике разработанной ЦНИИИГАиК (В,Я.Вайнберг). Составляющие угла наклона оси вычислялись по формулам из инструкции к электронным уровням.
За все время измерений с 1980 по 2004 год расчеты показывали, что наклон оси находится в пределах 1 секунды. Тем не менее, при измерениях в диапазоне «точно» прибор стал зашкаливать. Авторы методики предложили провести аттестацию прибора. После аттестации прибора расчеты показывали, что наклон оси находится в пределах 1 сек.
Был проведен ряд дополнительных измерений и проверок методик измерений для подтверждения или опровержения этих расчетов. Измерения, проводимые гидроуровнем ЛОМО и теодолитом REC ELTA (с точностью 2 секунды) показали, что наклон оси на восток составляет 15-20 сек.
При проверке формул расчета А.М.Притыченко доказал их ошибочность и сделал необходимые исправления. Авторы (В.Я.Вайнберг) согласились с исправлениями формул. По уточненным формулам произведен расчет наклона оси и оказалось, что, начиная с 1989 года, наклон оси превысил допустимые 5 секунд и прогрессирует. Что показано на графике.
ряд 1 – направление запад-восток
ряд 2 – направление север-юг
К 2004 году наклон увеличился до15 секунд, что соответствует измерениям гидроуровня и теодолита.
Техническим советом САО принят план работ по вертикализации с остановкой наблюдений в июне – июле 2004г.
План работ по вертикализации оси БТА в апреле – июле 2004г
|
№ |
Наименование работ |
Требуемые затраты времени |
Исполнители |
|
Подготовительные работы без остановки наблюдений. |
|||
|
|
Постановка задачи, изучение документации составление плана работ. |
1месяц |
Ю.М.Маметьев А.М.Притыченко |
|
1 |
Проверка точности наведения БТА для уточнения коэффициентов СКН, до начала вертикализации. |
4 часа наблюдательного времени |
В.С. Шергин В.М. Максимова |
|
2 |
Измерить боковой зазор в гл. червячном зацеплении, зазор в прямозубых зацеплениях. Измерить амплитуду наклона гидрошарнира МС «Z» при вращении БТА на 360о. |
1 день |
Мех. участок |
|
3 |
Сделать расчет величины подвижки радиальной опоры, расчет получаемого зазора в гл. червячном зацеплении, расчет получаемого зазора в прямозубых зацеплениях. |
1 день |
А.М.Притыченко |
|
4 |
Произвести необходимые расчеты для последующей регулировки зацеплений. |
1 день |
А.М.Притыченко |
|
5 |
Продумать схему, установить датчики для дополнительного контроля вертикальности оси. |
5 дней |
Мех. участок |
|
Работы с остановкой наблюдений. |
|||
|
6 |
Установить Z=0, выключить из работы грузы выборки мертвого хода по оси А. Уменьшить усилие поджатия пружинного упора подвески гл. червяка для освобождения шаров и стержня. Вывести гл. червяк из зацепления, вывести из зацепления прямозубые шестерни. Освободить крепление гидрошарнира СМП Z. |
1 день |
Мех. участок |
|
7 |
Отключить СМП Z, выключить агрегат смазки червяка. Включить СМП А, произвести смещение радиальной опоры на расчетную величину, контролируя перемещение по часовым индикаторам, по ЭУ и дополнительным точкам. Сместить гидрошарнир СМП Z. |
2 дня |
Мех. участок |
|
8 |
Отрегулировать гл. червячное зацепление, пружинный упор, прямозубые зацепления, включить грузы выборки мертвого хода. |
2 дня |
Мех. участок |
|
9 |
Включить СМП А, СМП Z, систему смазки червяка. Проверить амплитуду наклона гидрошарнира СМП Z. Проверить вертикальность оси по ЭУ. |
1 день |
Мех участок |
|
10 |
Проверка точности наведения БТА для уточнения коэффициентов СКН, после вертикализации. |
4 часа наблюдательного времени |
В.С. Шергин В.М. Максимова |
|
11 |
Составление отчета |
|
А.М.Притыченко |
|
|
Итого |
6 р. дней с остановкой наблюдений |
|
Выполнение работ по вертикализации оси А БТА
Схема изменения наклона и необходимые расчеты приведены на рис.1.
Порядок выполнения работ
- Установить телескоп в положение А = -180о, Z = 0о. Выключить СМП.

3. Фото 1.
- Вращать главный червяк за вал1 (фото 1).
5. Контролируя крайние положения координаты А (азимут) по дисплею на УВК, определить величину бокового зазора в главном червячном зацеплении (замерено 18.4сек.).
- Лебедкой поднять груз выборки мертвого хода (462кг 11 блинов по 42кг) до образования провиса троса 2 (фото 1).
- Измерить длину сжатых пружин 3 (L = 139mm) затем полностью их ослабить. Винтами А равномерно вывести главный червяк из зацепления с червячным колесом.
- Отвернуть гайки 1 (фото 2) крепления редуктора, освободив упоры 2 с помощью эксцентричного стакана 3. Вывести из зацепления малую шестерню цилиндрической передачи.
- Отвернуть болты 4 крепления корпуса контактного устройства и вывести его из зацепления.
- Отвернуть гайки 1 (фото 3) крепления гидрошарнира, подающего масло на ось Z.
11. Измерить усилие вращения монтировки по оси А, оно составило 8-10кг на радиусе червячного колеса.
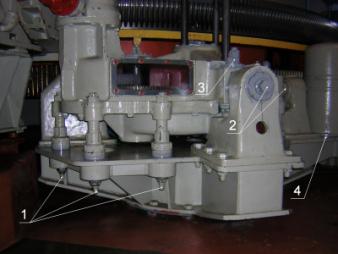
Фото 2

Фото 3
Смещение радиальной опоры СМ111сб20 на 0. 77мм, соответствующее устранению наклона вертикальной оси БТА на восток, производится следующим образом:
· ослабить пружину 1 (фото 4), выборки зазоров в шарнирных соединениях тяг, включить СМП и электронные уровни на прогрев;
· отвернуть стопоры 2 на червячных редукторах 3;
· вращая ключом валы червяков, сместить радиальную опору с запада на восток, контролируя её смещение по часовому индикатору и электронным уровням одновременно. Записать показания индикаторов и электронных уровней;
· добившись необходимого смещения зафиксировать стопорные винты редукторов, сжать пружину до исходного положения и затянуть контргайки.

Фото 4.
Регулировка червячного зацепления
Измерения показали, что ось червяка «А» до расцепления была смещена вниз относительно средней линии зацепления червячного колеса на 0.4¸0.5 мм. Перекос оси червяка и средней линии колеса составлял 61.6 сек. В архивных документах ЛОМО не отмечено рекомендаций по специальному смещению червяка. Поэтому червячное зацепление было отрегулировано с устранением этого смещения и смещения вызванного заклоном монтировки при вертикализации. Устранен перекос осей червяка и средней линии колеса.
Ввести главный червяк в зацепление и установить боковой зазор 20.8сек. Сжать пружины 3 (фото 1) до длины L = 133мм (было L = 139мм). Вращением эксцентриковых втулок роликов и поджатием 3-х пружин добиться того, чтобы ось главного червяка совпала со средней линией червячного колеса, а подвеска червяка находилась во взвешенном состоянии. При этом пятно контакта составило 75 – 80% по длине и высоте зуба, а ролики без зазора касались обода червячного колеса. После выполнения всех регулировок боковой зазор в червячном зацеплении установился 25.8сек.
Последующая проверка вращения телескопа после вертикализации показала, что при положении телескопа по А = 180о начала срабатывать защита на эл. приводах А.
Происходило касание опорно-поворотной части к страховочному упору. Принято решение снять стружку по 1мм на двух деревянных страховочных упорах А = -157.5о и А= -112.5о (азимут указан в привязке к азимуту телескопа). Упор А = -67.5о строгали ЛОМО, но за время эксплуатации телескопа упоры не cтрогали. (Фото 5.)

Фото 5.
Проверка положение вертикальной оси по уточненной методике ЦНИИГАиК
Таблица положения вертикальной оси БТА по датчикам ЦНИИГАИК до начала вертикализации. Измерение только в диапазоне грубо, т.к. диапазон «точно» зашкаливает.
|
25.06.1984г |
ξ= +14.85" |
||||||
|
АО |
V3 |
V4 |
|||||
|
|
|
Средн |
|
|
средн |
η= -1.1" |
|
|
-180 |
25 |
25.4 |
25.3 |
25 |
24.2 |
24.6 |
|
|
-90 |
26.5 |
27 |
26.75 |
23 |
22.6 |
22.8 |
|
|
0 |
25.2 |
25.6 |
25.4 |
21 |
21 |
21 |
|
|
+90 |
23.5 |
23.7 |
23.6 |
22.5 |
22.5 |
22.5 |
|
Таблица положения вертикальной оси БТА по датчикам ЦНИИГАИК после вертикализации. Измерение в диапазоне точно.
|
7.07.1984г |
ξ= +0.0975" |
||||||
|
АО |
V3 |
V4 |
|||||
|
|
|
Средн |
|
|
средн |
η= -0.57" |
|
|
-180 |
24.5 |
38 |
31.25 |
24.8 |
24.8 |
24.8 |
|
|
-90 |
22.9 |
34.5 |
28.7 |
21.8 |
23.5 |
22.65 |
|
|
0 |
29 |
36.3 |
32.65 |
19 |
22.2 |
20.6 |
|
|
+90 |
31.5 |
33 |
32.25 |
20 |
20.5 |
20.25 |
|
Во время проверки по звездам выявлено, что при А = +180о ±10о груз выборки мертвого хода не вращает телескоп, червяку приходится толкать телескоп, а не удерживать, когда он ведёт в минус. Обнаружено, что происходит трение троса о детали подвески из-за того, что неправильно выбрана точка крепления троса. Поэтому, при Ателескопа> =+160о , т.е. когда трос максимально намотан на цилиндр, а груз находится вверху, происходит его отклонение и трос пилит направляющую деталь подвески. Смотри (фото 6.)
Неисправность устранена по временной схеме. Требуется конструктивная доработка и телескопное время.

Фото 6.
Также во время наблюдений выявлено, что цилиндрическая пара включается в работу и во время режима ведения. В результате многократных регулировок и измерений принято решение об изменении методики регулировки цилиндрического зацепления (А.М.Притыченко). Регулировка бокового зазора цилиндрического зацепления, зазора между регулировочными винтами водила и упорным сектором шестерни Z = 100. Боковой зазор в цилиндрическом зацеплении, согласно требованиям чертежа СМ11сб.22 лист 1, должен быть 0.1 – 0.3мм.
К регулировке зазоров в водиле ЛОМО предусматривало неоднозначные требования:
1. Зазоры между винтами водила и упорным сектором шестерни Z = 100 выставлялись : левый 10.6мм, правый 9.8мм (см.акт. от 12.12.1977г.)
2. В технических требованиях чертеж СМ111сб.22 лист 1 п.17 даны другие указания по регулировке зазоров в водиле. «Зазор установить на 1мм больше той величины, при которой происходит осевое смещение главного червяка».
После вертикализаци и введения главного червяка в зацепление зазоры в водиле установлены согласно требования чертежа СМ111сб.22 лист 1 п.17 при положении телескопа А = - 46о. Нужно отметить, что оба варианта регулировки не исключают возникновения контакта в цилиндрическом зацеплении из-за неточности изготовления большого цилиндрического колеса. Т.е. на каком-то азимуте, телескоп будет вести цилиндрическая пара, а контакт в червячном зацеплении исчезнет. При этом усилия выборки мертвого хода не достаточно для обеспечения надёжного контакта в червячном зацеплении.
Чтобы исключить влияние цилиндрического зацепления, боковой зазор в нём увеличен до 0.8мм, а с помощью регулировочных винтов водила, зазор отрегулирован так, что при контакте в главном червячном зацеплении в цилиндрическом зацеплении оставался зазор 0.4мм с обеих сторон зуба. Такого зазора достаточно, чтобы компенсировать неточность изготовления большого цилиндрического колеса и не допускать включения его в работу по всему диаметру колеса, обеспечив механическую защиту червячной пары от перегрузок, путём включения цилиндрической шестерни в работу при смещении подвески червяка на 0.3-0.4мм. После устранения причин, вызывающих дополнительное сопротивление вращению телескопа по оси А, уменьшен груз выборки мертвого хода с 462 до 294кг.
25 - 26 июля проведены пробные наблюдения по звездам. Ниже приведены графики ведения звезды в ПФ.
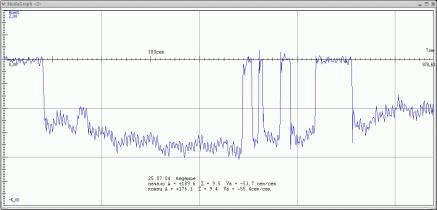
До регулировки цилиндрического зацепления.
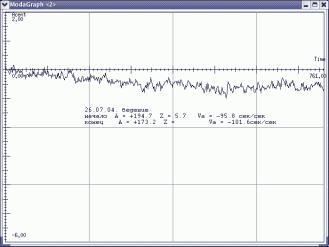
После регулировки.
Для более полного анализа состояния регулировок привода А необходимо телескопное время и накопление статистики в наблюдениях по звездам.
Работы с остановкой наблюдений проводились с 26.06 по 5.07.2004г. В результате выполненных работ по вертикализации, на телескопе устранены следующие неисправности:
- Первая ось БТА выставлена вертикально h = - 0.57сек, x = + 0.0975сек
- Предложены уточненные формулы для расчета составляющих угла наклона вертикальной оси по электронным уровням ЦНИИГАиК.
- Ось главного червяка совмещена со средней линией червячного колеса. Червяк поднят и устранен перекос.
- Устранено касание опорно-поворотной части телескопа к страховочным упорам.
- Устранено трение троса выборки мертвого хода о детали подвески.
- Отрегулированы по новой методике зазоры в цилиндрическом зацеплении и зазоры в водиле.
- Уменьшен вес груза выборки мертвого хода.
- Отрегулирована толщина масляной пленки на гидроопорах А, которая изменилась после вертикализации.
Отчет составил:
3.08.04г.
Нач. компл. БТА Ю.М.Маметьев
Нач. мех. уч-ка СЭК БТА А.М.Притыченко